

A number of attempts have been made to use the benefits of 3D laser scanning techniques in underwater environments. Unfortunately, due to a number of operative problems with such devices, their accuracy and therefore applicability remains quite low. In {{ pubref 1 }} we specifically focus on these practical issues by expanding on previous works in this area and improving their usability. The main result presented in our paper is a calibration procedure for triangulation-based 3D laser scanners in underwater environments. The procedure facilitates quite promising precision and reliability while at the same time avoids unpractical deployment overhead.
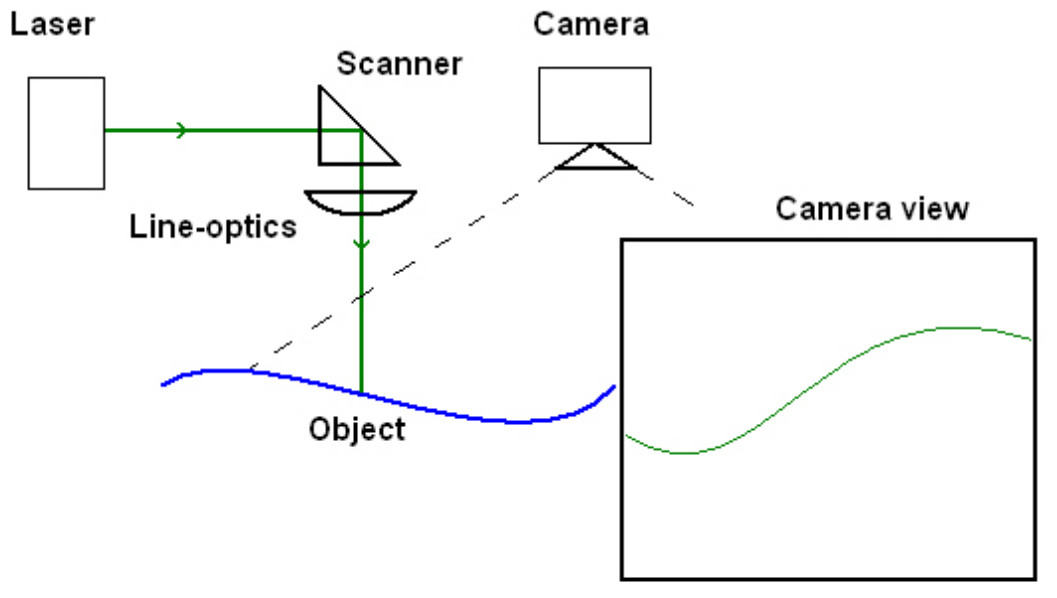
The calibration procedure has the aim to find the geometrical parameters of the laserscanning system. Figure 1 illustrates the overall setup of such a system. The geometrically defining parameters of the system are the baseline, i.e., the distance between the optical axis of the camera and the origin of the scanning head, the pitch angle of the camera and the minimum, maximum and mean angles of the scanning head that moves the laser line. The achievable accuracy of manually measuring these values is relatively low. Manually measuring the baseline distance means exact knowledge of the camera’s optical axis position inside the watertight housing. A similar problem applies to the measurement of the camera’s pitch angle, which is aggravated by the general inaccuracy of angular measurements. Measurement of the minimum, maximum and even the intermediate angles of the scanning head is comparatively easy, as a planar object could be placed in the plane spanned by baseline and optical axis. Then, the laser line’s projection on this object can be marked and the respective angle measured. Yet, this would still be not very accurate. To avoid such manual measurements we propose to use a simple calibration rig that has known dimensions and can be used to first calibrate the camera itself and then use the calibrated camera to characterize the properties of the laser scanning head. This approach eliminates the necessity to measure any of the system parameters manually, while at the same time keeping the calibration process simple enough to be applied in non-laboratory environments.
References
1
,
A practical underwater 3D-Laserscanner,
In: Proceedings of the MTS/IEEE Conference on Oceans, Poles and Climate. MTS/ IEEE Oceans. IEEE, 2008,
[pdf|doi|bibtex]