

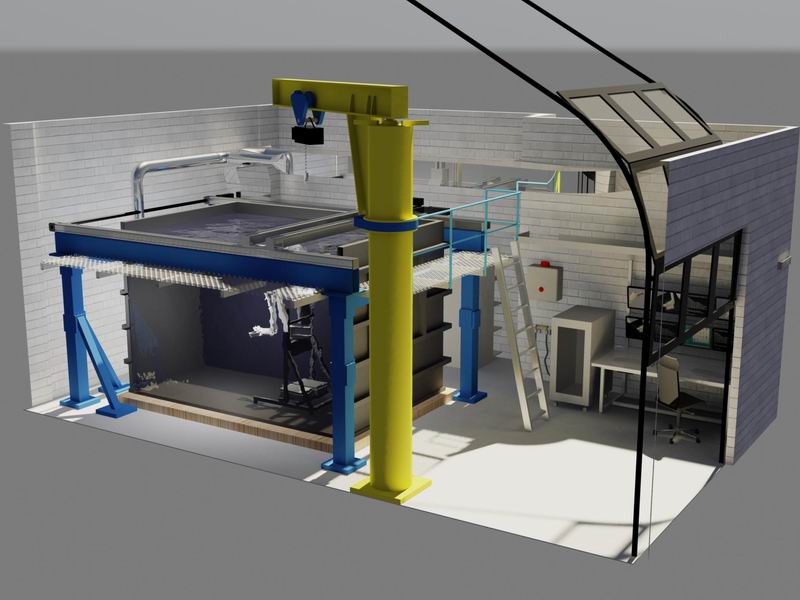
Designing and setting up our underwater test lab was a significant part of the C-Manipulator project [1]. To explore computer-assisted manipulation in deep sea environments we aimed at reproducing an controlling a number of key variables including lighting conditions, turbidity of the water, and movements of the manipulator base. To control the lighting conditions we opted for a black tank and sealed the water surface with multiple layers of black hollow spheres, which are commonly used to limit evaporation and reduce the presence of birdlife on water reservoirs. To control the turbidity we installed turbidity sensors, a powerful filtration system, and chose a reasonable tank size of 25m³ to allow for a quick turnaround time. We tested various means to increase the turbidity of the water in a controlled fashion, e.g., by dissolving precise amounts of clay, lime, or certain pigments. In order to control the movements of the manipulator base, e.g., to simulate the movements of an ROV, we installed a 3D gantry crane above the tank that facilitated precise and repeatable movement. Besides these main elements we installed additional support infrastructure like a pillar slewing crane to lift test articles in and out of the tank as well as an external hydraulic system to power the hydraulic underwater manipulator while keeping the noise levels inside the lab on a tolerable level.
In order to properly plan, execute, and evaluate our experiments we designed and installed a supervision system that recorded each experiment from various camera angles and sensory sources. The system also provided enough screen real estate to display this data in a way that allowed us to review multiple data sources at once during and after an experiment. Organization-wise we designed rigorous test and safety procedures as the systems we dealt with left only a small margin for error.
References
1
,
C-Manipulator: An Autonomous Dual Manipulator Project for Underwater Inspection and Maintenance,
In: Proceedings of OMAE 2007. ASME 2007 International Conference on Offshore Mechanics and Arctic Engineering. San Diego, USA, 2007,
[pdf|doi|bibtex]