

The main tool of modern work-class ROVs are manipulators. These manipulators are usually controlled by an operator via a master-slave system. The only knowledge an operator has about the movements the manipulator arm is able to perform in its current configuration is based on the views of the ROV’s cameras and the operator’s experience. There is no direct feedback to the operator, whether a desired position can be reached, and how much the manipulator wrist can be rotated at the position that is required by the task at hand. This is a serious limitation considering the fact, that one of the primary tasks of modern ROV deployment is intervention work. Intervention in these cases consists of more an more task like opening fixtures, plugging connections etc. A strategy to circumvent the problem of the manipulators unknown movement capabilities is to fix the arm to a defined position and move the vehicle instead. This is done especially in cases where the ROV can move freely in the water column, despite of modern ROVs' capabilities of automatic station keeping.
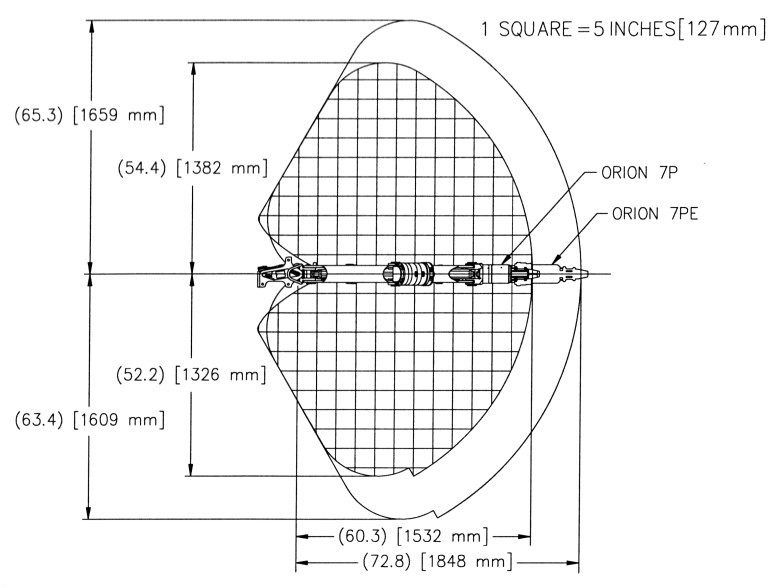
In robotics the ability of a robotic arm to reach a certain position in its working space and to be able to orient its tool is called dexterity. The part of the working space which allows the movement in all euclidian degrees of freedom is called the full-dexterous workspace. As the workspace is a multi-dimensional space, the calculation of the full-dexterous workspace is computationally expensive, which is why classic robot control algorithms try not to calculate it directly and rely on numerical methods instead. In [1] we present a new tele-operation centered representation of the workspace, which allows to quantify a manipulator’s dexterity at a given position. This representation is used to analyse the workspace of an ORION 7P from Schilling Robotics. In addition, the paper presents a real-time capable algorithm that can generate online information about the current dexterity of the manipulator using this new workspace representation.
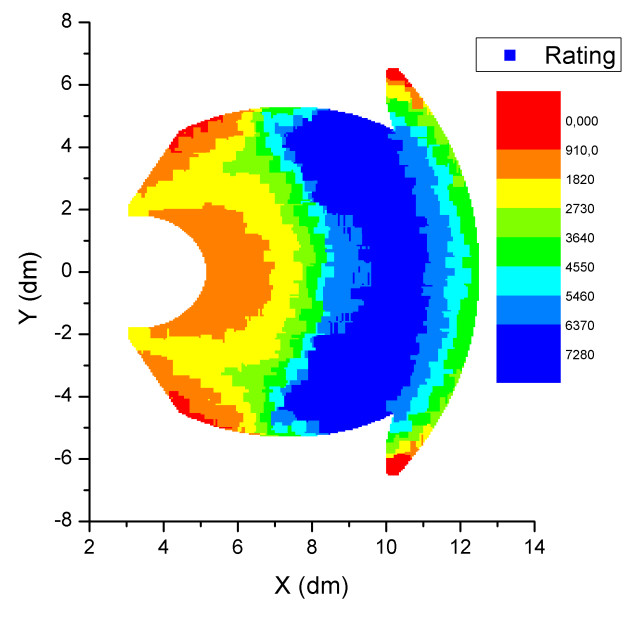
Based on observations how ROV manipulators are used in practise we introduce the concept of the semi-dexterous workspace. It is defined as a subset of the full euclidean workspace, which allows euclidian orientation of the TCP-Frame (TCP is the tool center point) with respect to a given direction and an angular variation around this direction. The possible degree of the latter for a given position and direction allows to quantify the movement capabilities of the TCP in that particular situation. This focus on certain, typical operating directions allows to analyse the dexterous workspace of a manipulator for that direction. Figure 2b illustrates such an analysis for a front-down position of the manipulator’s gripper.
References
1
,
Automatic Workspace Analysis and Vehicle Adaptation for Hydraulic Underwater Manipulators,
In: OCEANS MTS/IEEE Conference (OCEANS-09). o.A., 2009,
[pdf|doi|bibtex]